%20(1).png)






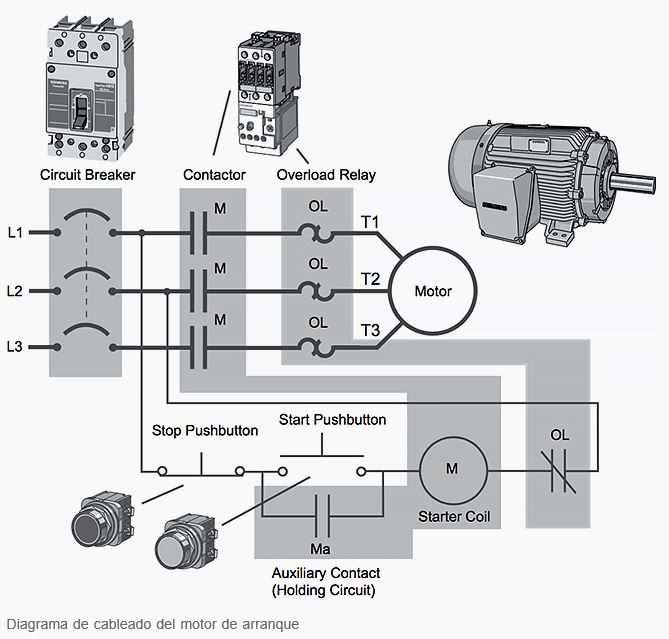
Calcular el tamaño de cada componente del arrancador a tensiòn plena (DOL) para un motor trifásico de AC a un voltaje de 440 V.
El motor es de inducción trifásico de aplicación doméstica 1/4 HP, Código o Clave NEMA J, la eficiencia del motor 60.2%,RPM =1670, factor de potencia = 0.6

De la placa de datos del motor se obtiene la siguientes informacion: Voltaje: 440V Potencia: 1/4 HP Eficiencia: 60.2% Rpm: 1670 F.P: 0.6, Clase F.
Calcule el par nominal del motor en (Nm), par de arranque, corriente a rotor bloqueado. corriente nominal y corriente de arranque.
El par nominal Tn se calcula con la siguiente fórmula:
Tn (Nm) = 9550 *KW/RPM
Sustituyendo:
Tn = 9550 * 0.186/1670
Tn = 1776.3/1670
Tn = 1.0636 = 1Nm = Par nominal
Si la potencia del motor es menor a 30 Kw, el par de arranque del motor es de 2 a 3 veces el par nominal del motor. de lo anterior:
Ta = 3*1 Nm Ta = 3 Nm = Par de arranque.
Para calcular la corriente a rotor bloqueado nos auxiliamos de la siguiente tabla con valores minimos y maximos.


Corriente del rotor bloqueado = 1000*HP* Min o Max/ 1.732 × V
De lo anterior:
La corriente min a rotor bloqueado = 1000*0.25*7.1/1.732*440
Imin rb = 1775/762.08
Imin rb = 2.32 A
La corriente Max a rotor bloqueado = 1000*0.25*8/1.732*440
Imax rb = 2000/762.08
Imax rb = 2.62 A
Para calcular la corriente nominal utilizamos la siguiente fórmula:
IL = KW*1000/1.732*V*F.P
sustituyendo:
IL = 0.18*1000/1.732*440*0.6
IL = 180/457.248 I L = 0.39=0.4A
La corriente de arranque del motor es de 6 a 7 veces la corriente nominal.
por lo tanto Ia =7*0.4 A.
Ia=2.8A.
1. Tamaño del fusible.
De acuerdo con la norma NEC 430-52, nos auxiliamos de la siguiente tabla.

El Tamaño de fusible con retardo es:
Fdelay = 300% * Corriente a plena carga IL
Fdelay = 300% * 0.4A
Fdelay = 1.2A
El tamaño de fusible sin retardo es:
Fnodelay = 175% * Corriente a plena carga I L
Fnodelay = 175% * 0.4A
Fnodelay = 0.7A
2. Tamaño del disyuntor
Para seleccionar un disyuntor nos auxiliamos de la siguiente tabla:

Tamaño del disyuntor con disparo instantáneo
= 800% * Corriente a plena carga I L
Tamaño del disyuntor con disparo instantáneo = 800% * 0.4A
Tamaño del disyuntor con disparo instantáneo = 3.2A
3. Relevador sobrecarga bimetálico.
Para configurar el relevador de sobrecarga bimetálico en su Valor min y max se considera lo siguiente;
configuración del relé de sobrecarga min = 120% x Corriente a plena carga IL
Relé de sobrecarga min = 120% x 0.4= 0.6 A
Relé de sobrecarga max = 120% x Corriente a plena carga IL
Relé de sobrecarga max = 220% x 0.4 = 0.88A
4. Tamaño y tipo de contactor.
De la siguiente tabla seleccionamos el tipo de contactor de acuerdo con la aplicaciòn:

Tamaño del contactor = 175% X Corriente a plena carga IL
Tamaño del contactor = 175% x 0.4A = 0.7A.
Para descargar la información de este articulo en un archivo PDF Click en la imagen o Aquí para poder obtenerlo
Para calcular la corriente nominal utilizamos la siguiente fórmula:
IL = KW*1000/1.732*V*F.P
sustituyendo:
IL = 0.18*1000/1.732*440*0.6
IL = 180/457.248 I L = 0.39=0.4A
La corriente de arranque del motor es de 6 a 7 veces la corriente nominal.
por lo tanto Ia =7*0.4 A.
Ia=2.8A.
1. Tamaño del fusible.
De acuerdo con la norma NEC 430-52, nos auxiliamos de la siguiente tabla.

El Tamaño de fusible con retardo es:
Fdelay = 300% * Corriente a plena carga IL
Fdelay = 300% * 0.4A
Fdelay = 1.2A
El tamaño de fusible sin retardo es:
Fnodelay = 175% * Corriente a plena carga I L
Fnodelay = 175% * 0.4A
Fnodelay = 0.7A
2. Tamaño del disyuntor
Para seleccionar un disyuntor nos auxiliamos de la siguiente tabla:

Tamaño del disyuntor con disparo instantáneo
= 800% * Corriente a plena carga I L
Tamaño del disyuntor con disparo instantáneo = 800% * 0.4A
Tamaño del disyuntor con disparo instantáneo = 3.2A
3. Relevador sobrecarga bimetálico.
Para configurar el relevador de sobrecarga bimetálico en su Valor min y max se considera lo siguiente;
configuración del relé de sobrecarga min = 120% x Corriente a plena carga IL
Relé de sobrecarga min = 120% x 0.4= 0.6 A
Relé de sobrecarga max = 120% x Corriente a plena carga IL
Relé de sobrecarga max = 220% x 0.4 = 0.88A
4. Tamaño y tipo de contactor.
De la siguiente tabla seleccionamos el tipo de contactor de acuerdo con la aplicaciòn:

Tamaño del contactor = 175% X Corriente a plena carga IL
Tamaño del contactor = 175% x 0.4A = 0.7A.
Para descargar la información de este articulo en un archivo PDF Click en la imagen o Aquí para poder obtenerlo

Si aún tienes dudas te dejo el video con la explicación completa.
Por actualización a una nueva versión el Curso de Control eléctrico Industrial tiene una oferta del 50% de descuento así que pide informes a electroclubcontacto@gmail.com

P.D LOS QUE YA ADQUIRIERON EL CURSO RECIBIRÁN LA ACTUALIZACIÓN SIN NINGÚN COSTO EXTRA